Teams in the MassRobotics’ Form and Function Robotics Challenge show the world how they can create a unique cutting edge project that solves a problem with robotics and automation while also looking spectacular
The MassRobotics Form and Function Challenge made a call out to university students globally to create a robotics or automation project both visually awe-inspiring and accomplishing a useful function. The challenge encouraged cross-collaboration between state-of-the-art software and hardware providers including Lattice Semiconductor, Nano Dimension, Danfoss, FESTO, OnShape, Novanta and Analog Devices. The Challenge opened in December 2022 and teams from around the world applied. The 18 selected teams had five months to build their robots. They presented their work to a panel of judges at the Robotics Summit on May 10 and the winners were announced on May 11 in Boston.

Participating universities included Brown University, University of Bath, University of Calgary, MIT, Stevens Institute of Technology, Tufts University, Worcester Polytechnic Institute, Northeastern University, Indiana University Bloomington, Seoul National University, Kwame Nkrumah Science and Technology, University of Southern Denmark.
The resulting solutions produced by the teams were diverse, including everything from an automated smoothie making machine to a robotic assisted leg brace.
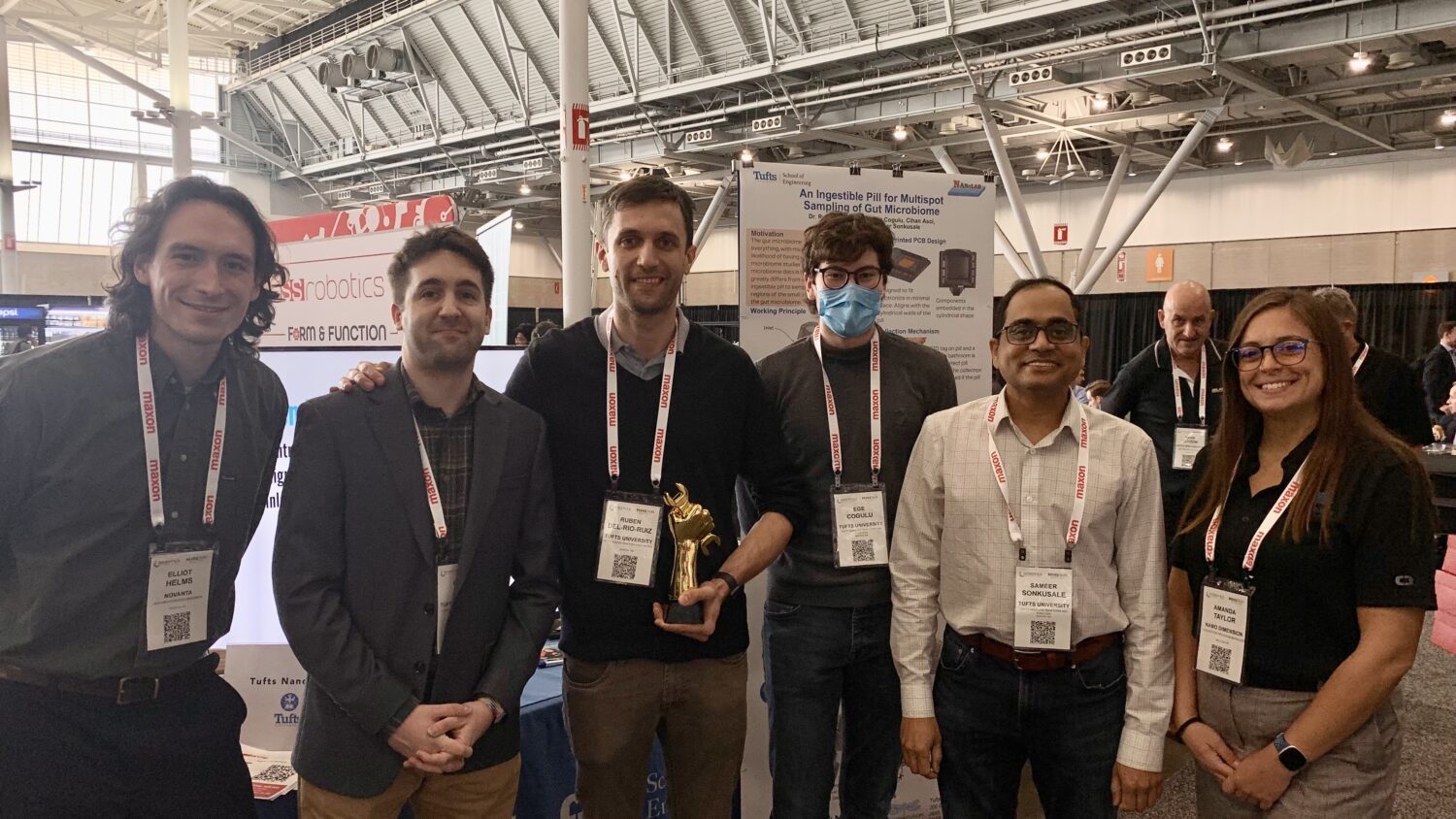
The Tufts University Nano Lab team won first place with their ingestible pill and took home a grand prize of $25K. The 2nd- and 3rd-place winners were the MIT WORMS team and the WPI Wheeled Biped team, each earning a prize of $5K.
Attendees at the conference had the opportunity to participate by voting for their favorite project and after tallying the votes, the “Audience Choice Award” went to Smart Gripper Tethered Unmanned Ground Vehicle System from Indiana University Bloomington; the team received $5K in prize money.
Teams showcased their solutions to the thousands of visitors to the Robotics Summit and attendees got a chance to see unique robots and automation these inspired teams developed.
Further descriptions of some of the teams work that presented include:
1st Place
Tufts Nano Lab team built an Ingestible Pill for Multi-Spot Gut Sampling. The enteric coating protects the pill from a highly acidic environment. When the pill enters the proximal region of the small intestine, the enteric coating dissolves. It’s then externally activated at the desired sampling region through RF. The pill takes samples from two regions of the intestine. The pill then travels through the GI tract and is recovered for testing. The team utilized technology from OnShape, Nano Dimension and Novanta.
2nd Place
MIT WORMS, or The Walking Oligomeric Robotic Mobility System (WORMS) team, designed reconfigurable lunar robots for extreme terrain access. Worms (generic, standalone robots) can be reconfigured by astronauts in the field using a universal mechanical interface. The WORMS team configured a hexapod robot as a demonstration. They utilized technology from Novanta, FESTO, Analog Devices, Lattice and Danfoss.

3rd Place
WPI Wheeled Biped team felt that mobile robotics is traditionally limited to smooth surfaces for wheels or to the complexities involved with legged robots. Their Scout robot combined wheels and legs into one efficient, versatile and simple mobile robotic platform. They utilized technology from Analog Devices.
Audience Choice
TeamIU Indiana University Bloomington felt that UAVs are often limited by their payload capacity and flight time, making them primarily used as flying sensors. TeamIU developed a miniature UGV and a compact tethered module that can be attached to the UAV or other moving platforms. The compact design, which includes an arm motor inside a free wheel, enables enhanced mobility and versatility for a wide range of applications. They utilized technology from Nano Dimension, Lattice, FESTO, OnShape and Analog Devices.


The University of Southern Denmark team built UnOrthoDOCS or Unibody Orthotic Device for Osteoarthritis Knee Support. UnOrthoDOKS helps people with debilitating knee arthritis to perform physical exercise to strengthen the muscles around the knee under rehabilitation therapy that is crucial to manage knee pain and improve mobility.
UnOrthoDOKS seamlessly integrated form and function with an ergonomic x-wing design, an adjustable motorized elastic tendon drive and a form-fitting 3D-printed flexible unibody frame. UnOrthoDOKS is a combined knee brace and a resistance band. As a knee brace it supports knee muscles by providing dynamic power-assist in everyday activities like walking, standing and sitting. As a resistance band it strengthens knee muscles by providing dynamic resistance in resistance training exercises like squats and leg raises. UnOrthoDOKS used technologies from OnShape and Novanta.
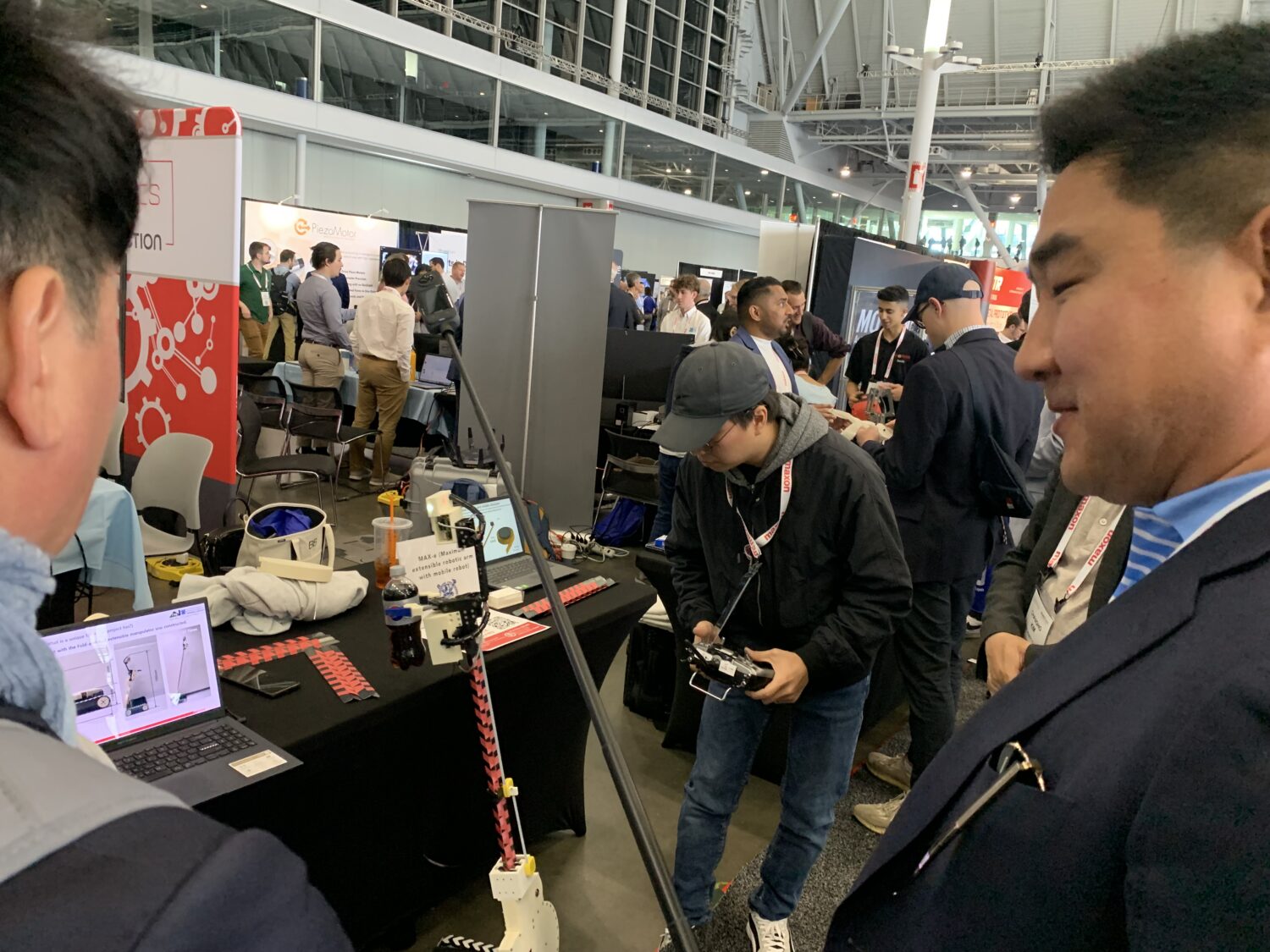
Team MAX-e from Seoul National University South Korea made MAXimally, an extensible robotic arm. Extending a robot’s reach is essential to improve and expand its capabilities. Their unique arm design can be extended a long way and has a high load capability. The arm also folds into a compact holster. Compact yet strong, this robot arm is ideal for small mobile robots with various applications. MAX-e used technology from OnShape, FESTO, Analog Devices and Danfoss.
The Mountain Robot: Search and Locate team from Stevens Institute of Technology built MR.SAL, a six-legged walking robot with the goal of navigating through the most risky mountain conditions, essentially a robotic Saint Bernard. The unique form is a modular hexapod design that allows for future implementation of complex movements. Its ultimate function goals are to start missions earlier via remote control, understand the victim’s condition and to keep volunteers safe. MR.SAL used technology from Analog Devices and OnShape.
The team from Northeastern University built a modular conveyor ecosystem. Originally meant to serve as both a large cutting board and a dynamic conveyor system for use by butchers in large, food-processing facilities, the system’s novel architecture can easily be applied toward material handling of many different types of payloads. Voxels have flat faces that align flush with the tabletop when the system is at rest, like a fluid canvas ready to transport or manipulate anything that may land on it. Unlike circular rollers, which rely on a no-slip tangential contact with the bottom of the payload, voxels can also exert upward or lateral forces onto the overhead payload. Therefore, their system can go from manipulating a bag of potatoes to handling fresh cuts of tuna fish. They used technology from Analog Devices, FESTO, OnShape and Novanta.
Medication Adherence Team from Tufts University highlighted how medication nonadherence causes 125,000 deaths annually. Considering that 75% of the 50+ population take medication, they felt this is a problem that needs to be tackled. The team addressed this issue in a unique way by developing a routine-based alert system that triggers when the user performs a certain event in their daily routine. Because the alert is consistent with the user’s schedule, it ensures they are in a location that allows them to easily take their medication. As the device relies on motion, it can be paired with almost any action – a door opening, picking up a toothbrush, pouring coffee – all of these actions and more can be set to remind the user to take their medication. The team used technology from OnShape.
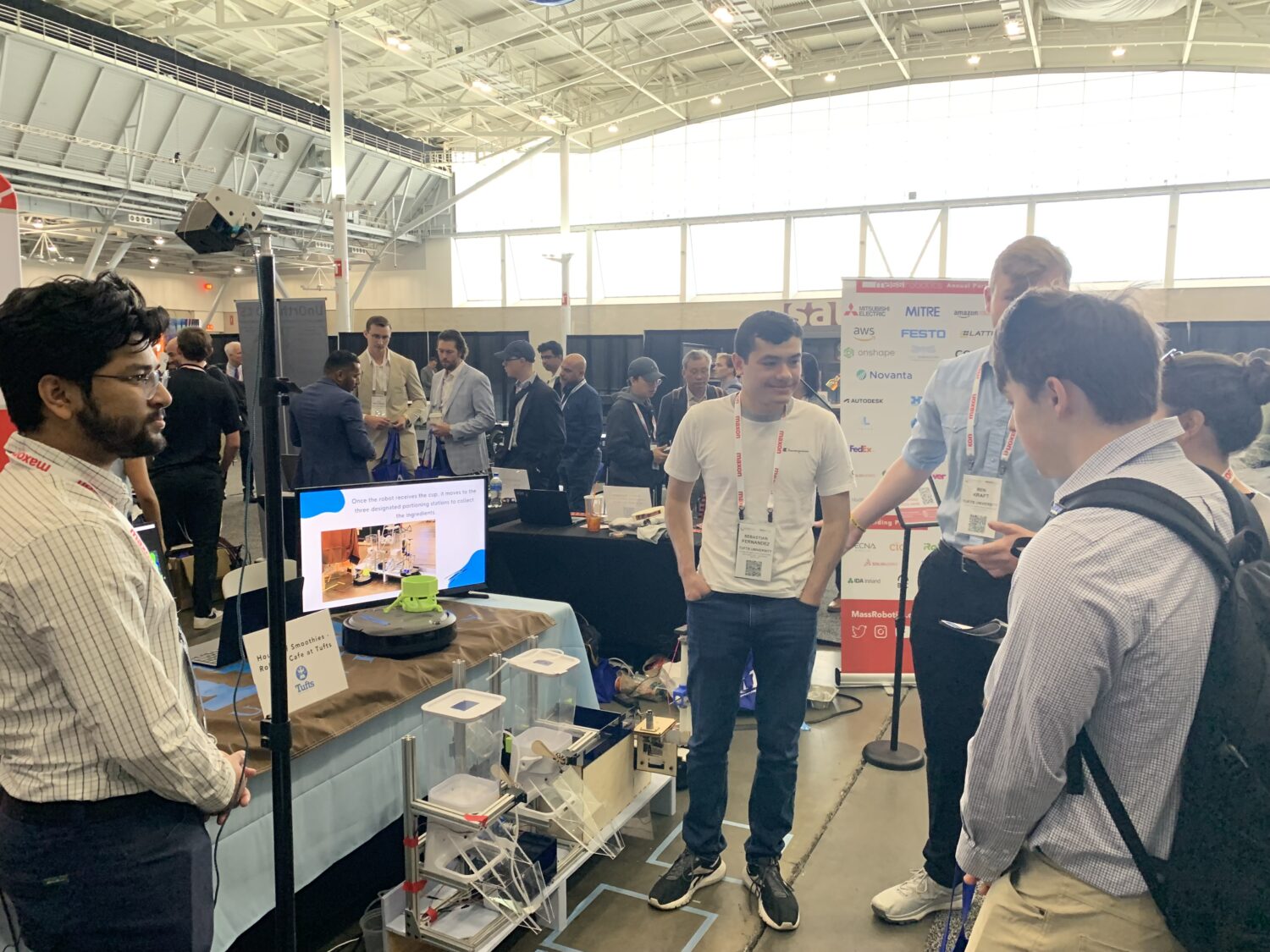
Autonomous Smoothie Cafe team from Tufts University developed The House of Smoothies Autonomous Café as a fun and tasty way to engage with robots. This robotics smoothie cafe is unlike any automated cafe in the current restaurant industry. With minimal setup, the cafe can complete dispensing, processing (such as cutting), and blending of fruits and liquid. The cafe is also easily transportable, with the majority of the mechanisms contained to each drivable robot. They used technology from Analog Devices, OnShape along with iRobot Creates.
The team from Stevens University developed the Drone Inflight Battery Swap (DIBS.) It was aimed to revolutionize drone technology by building a battery resupply system that allows drones to perform extended, continuous, uninterrupted flight for military and civilian applications. DIBS is an improved method of supplying power to a drone by completely swapping a low-charge battery for a new, fully charged one mid-flight. DIBS used technology from OnShape and Nano Dimension.
The Innobot team from the University of Bath aims to democratize access to robotics education, providing an affordable and accessible platform for students even in remote and underprivileged regions, fostering problem-based learning and empowering them
with valuable skills for the future job market. Innobot used technology from Novanta, Analog Devices and OnShape.
Students and professors, keep an eye out for upcoming challenges and engagement opportunities from MassRobotics HERE.
Anyone interested in corporate partnerships to get connected with a global robotics academic and startup ecosystem, please contact us HERE